Myostat
HY Series Gearbox-Motor Assemblies
Backlash and Kinematic Error Testing
Myostat recently introduced the new HY series Hypoid right angle gearboxes to our product line. Suitable for input torques between 76 N-CM and 357 N-CM these high efficiency gearboxes offer a high ratio in a small footprint, are more efficient than a worm drive, quieter than a bevel set and feature smooth action and sealed shafts.
By pairing our fully closed loop Cool Muscle motor with these new HY series Hypoid right angle gearboxes we created two Gearbox-Motor assemblies.
The HY-070, combined with CM1-X-11L30A or CM1-X-11S30A is available in 5:1, 10:1 and 20:1 ratios and is ideal for positioning axis that are space constrained or have unique space envelopes.
The HY-090, combined with CM1-X-17L30A or CM1-X 1 7S30A is available in a 10:1 ratio and is ideal for pick and place, conveyors, rotary stages, label feeders or peristaltic pumps.
Prior to release we created a test rig that allowed us to connect the output of our new motor-gearbox assembly to a second motor with an encoder and a resolution of 50,000 pulses per revolution.
For each trial we completed one full revolution of the output shaft in each direction and collected data over 100 pulses, for a total of 1,000 data sets. We then analyzed the input and output position values to determine the sources of error and their magnitude.
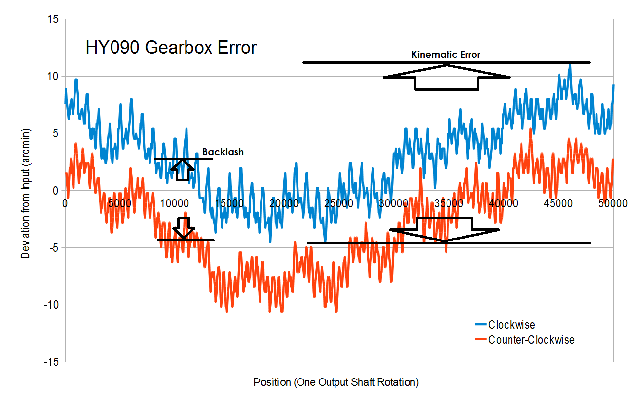
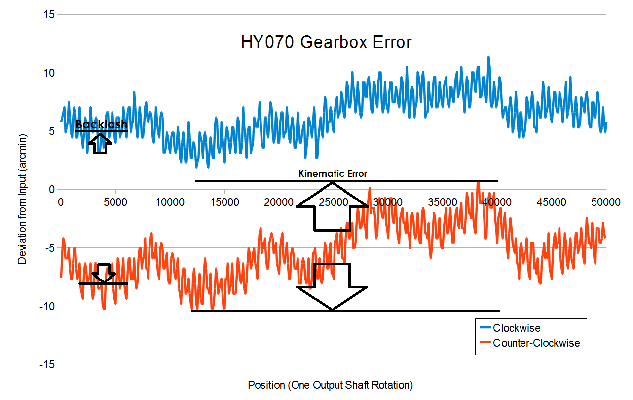
Backlash was determined by averaging the difference between the clockwise and counterclockwise data sets
The Kinematic error was determined by finding the maximum and minimum deviation (range of values) for both the clockwise and counterclockwise data sets and choosing the larger of these two ranges.
By performing several iterations of the test we were able to determine both the kinematic error and backlash of our new assembly. Results of these tests are illustrated in the graphs below.
HY070 was found to have a backlash of <=12 arcmin and kinematic error of <=11 arcmin
HY090 was found to have a backlash of <=6 arcmin and kinematic error of <=16 arcmin